GPS Viewer\Logger and New flag for how many tiles to keep in the scene #180
Conversation
* export dave_gazebo_world_plugins_msgs Signed-off-by: Mabel Zhang <mabel@openrobotics.org> * tabs -> spaces Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
|
@j-herman It's now ready with tutorial datasets! Can you give it another spin to check its features?
|
|
Tested on a clean slate computer while reviewing the other PRs. Found two other python modules required for GUI: |
…consistent between --install and --no-install (#182) Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
|
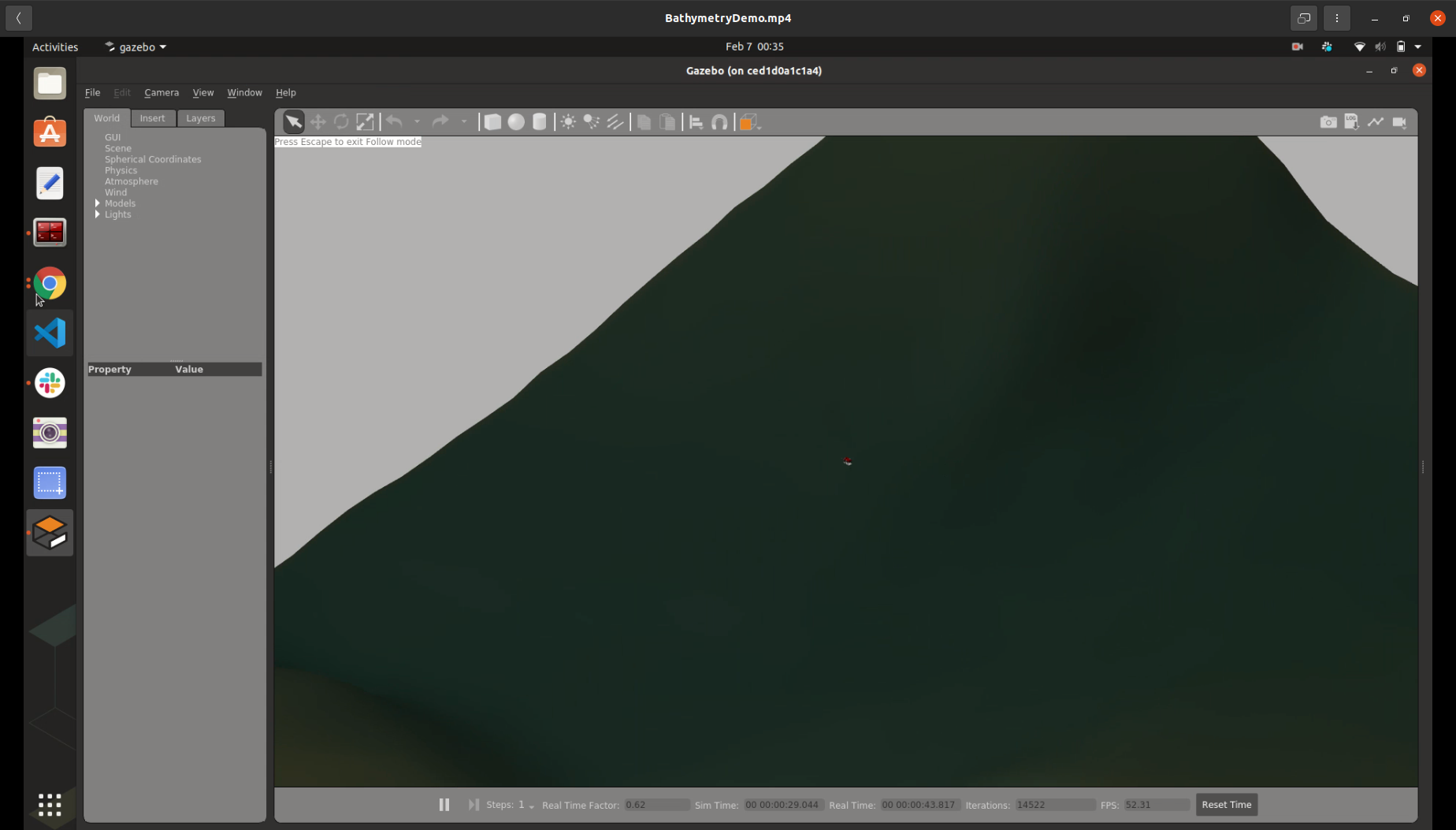
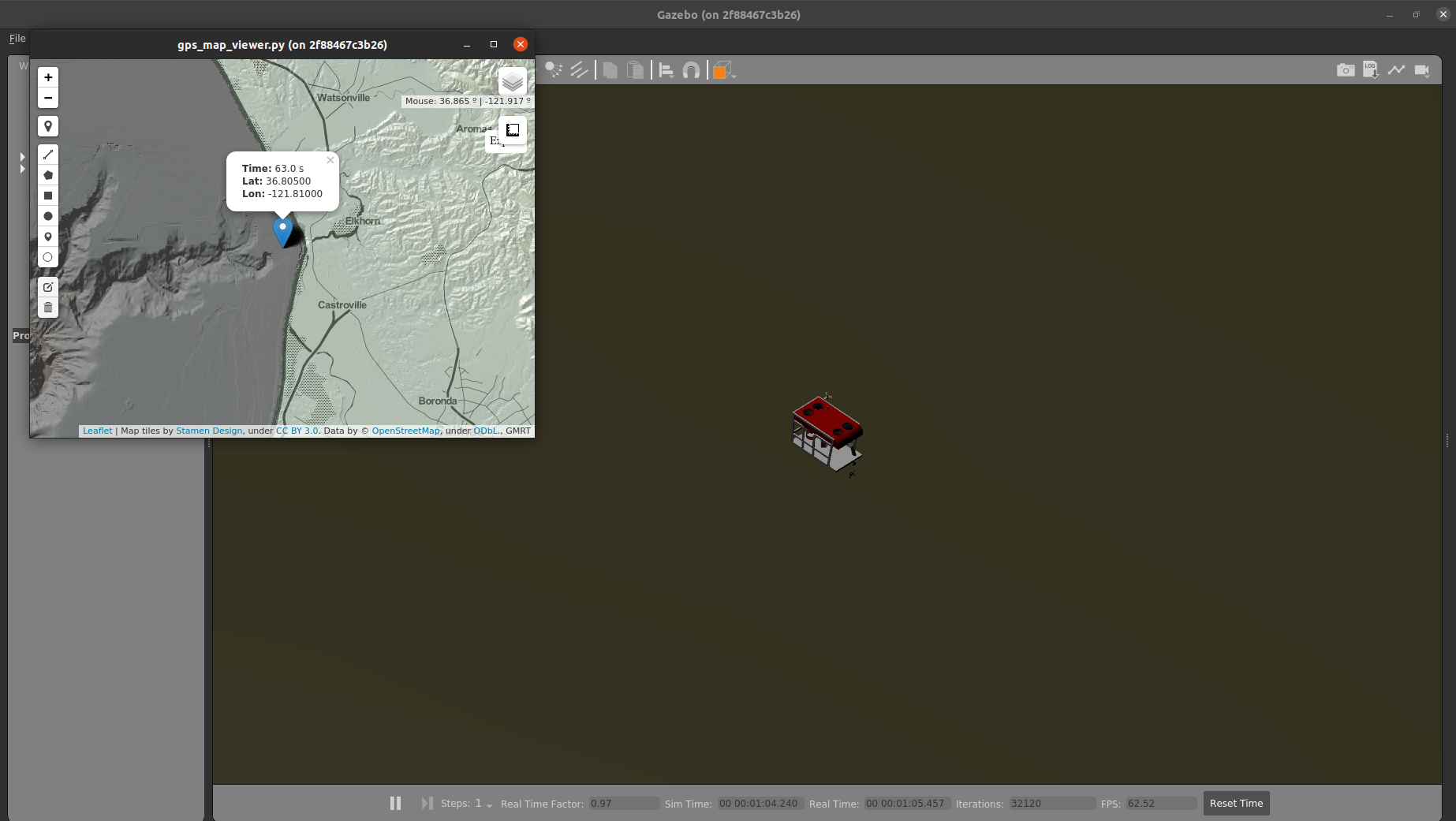
@woensug-choi I was able to run the converter via the new docker image and get the tutorial tiles built, and I pulled the new demo files per the Bathymetry Integration wiki instructions. The GPS viewer is opening correctly (it looks great!) and the initial position appears to be set, but something's not working with the launch and world file - the vehicle spawns in pieces and the tiles don't seem to be showing up. I will do some troubleshooting to see if I can pin down the problem. If this sounds familiar and you know what file or function might be missing to get these results, please let me know! |
|
@j-herman Thank you for trying!
So, here's my imagination of what has happened so far,
|
Actually, it seemed to install just fine, but when I tried to run gdown to get the files it couldn't connect. It looked like it might be a problem with paths and permissions, which is why I tried
Thanks!
Yes
Yes, that's what happens. The vehicle's pose also shows up as changed. The bathymetry is found initially - I see the messages in the terminal.
Repeating:
Got it. This sounded familiar! When I run in docker, it seems to work ok. Sorry it took so long to get the errors back to you. I tried a fresh pull of all the repos and catkin build to see if I just had some sort of lingering system configuration problem, and it took me way too long to get everything back into a running state! Update after initial troubleshooting... It's an issue with creating the PoCT variable, somewhere in here: The initial transform is failing: I checked my versions - PROJ 7.2.1 and GDAL 3.3.2. From the command line I can retrieve the information for EPSG:3857 and EPSG:4326 via 'projinfo EPSG:XXXX'. |
|
@j-herman Its frustrating that I cannot reproduce the problem. You are testing on the local machine right? Did the tutorial work in the docker environment? |
|
I installed python3-gdal the first time. When I deleted proj and gdal and reinstalled, though, I installed each separately. I'll try uninstalling all of them again and reinstalling with only python3-gdal. It does seem like a potential versioning issue, so I will also uninstall everything and reinstall the versions that are working for you. I've confirmed that the versions installed now with python3-gdal are PROJ 7.2.1 and GDAL 3.3.2, after fully removing anything related to gdal from the system and reinstalling (even ROS and Gazebo got purged, which was unexpected!) |
|
@j-herman I am confused. How about |
|
@woensug-choi That does look simple! I will try. The documentation I found didn't have options... |
|
@j-herman No it didn't sorry. I was getting the version without any options. Strange.. do they have different apt repo list for different regions? |
|
It's possible. Which ubuntu/ROS/Gazebo versions are you running with? I upgraded to 20.04/Noetic/11 since the last time I tried to do any serious work with gdal. Also, it looks like a new version came out just a few weeks ago so maybe some of the repos that hadn't upgraded caught that one. |
|
At dockwater image, ubuntu 20.04.3 LTS, Noetic, Gazebo 11.10.1, Python 3.8.10. Anway, hope |
|
Ok, I forced gdal and proj back to the earlier versions: Also added the following so I could confirm with ogrinfo: No luck. I am still seeing the same results. The only thing that has changed is that now the GPS viewer doesn't open - it fails with the following error: I am going to try one more time in docker (this last round was on the host system). If that still won't work, maybe we can ask someone else who hasn't already installed gdal on their system to give it a fresh look. |
|
I tried this demo on noetic dockwater image with fresh gdal. The world is loading up as expected. GPS Viewer is failing to launch, initially it was some dependency issue with pyqt5-tools. But fixed that and now have got python3-gdal (3.0.4+dfsg-1build3), pyqt5-tools (5.15.4.3.2), PyQtWebEngine (5.15.5). gps_map_viewer-12 is still dying. The log file which the gps_map_viewer error is logged doesn't exist, which is weird, I'll get back once I find out the errors. Another thing, the wiki recompiled the code by catkin build, but I used catkin_make previously so went with that. Apart from that, the merry_go_round.py script is working fine. |
|
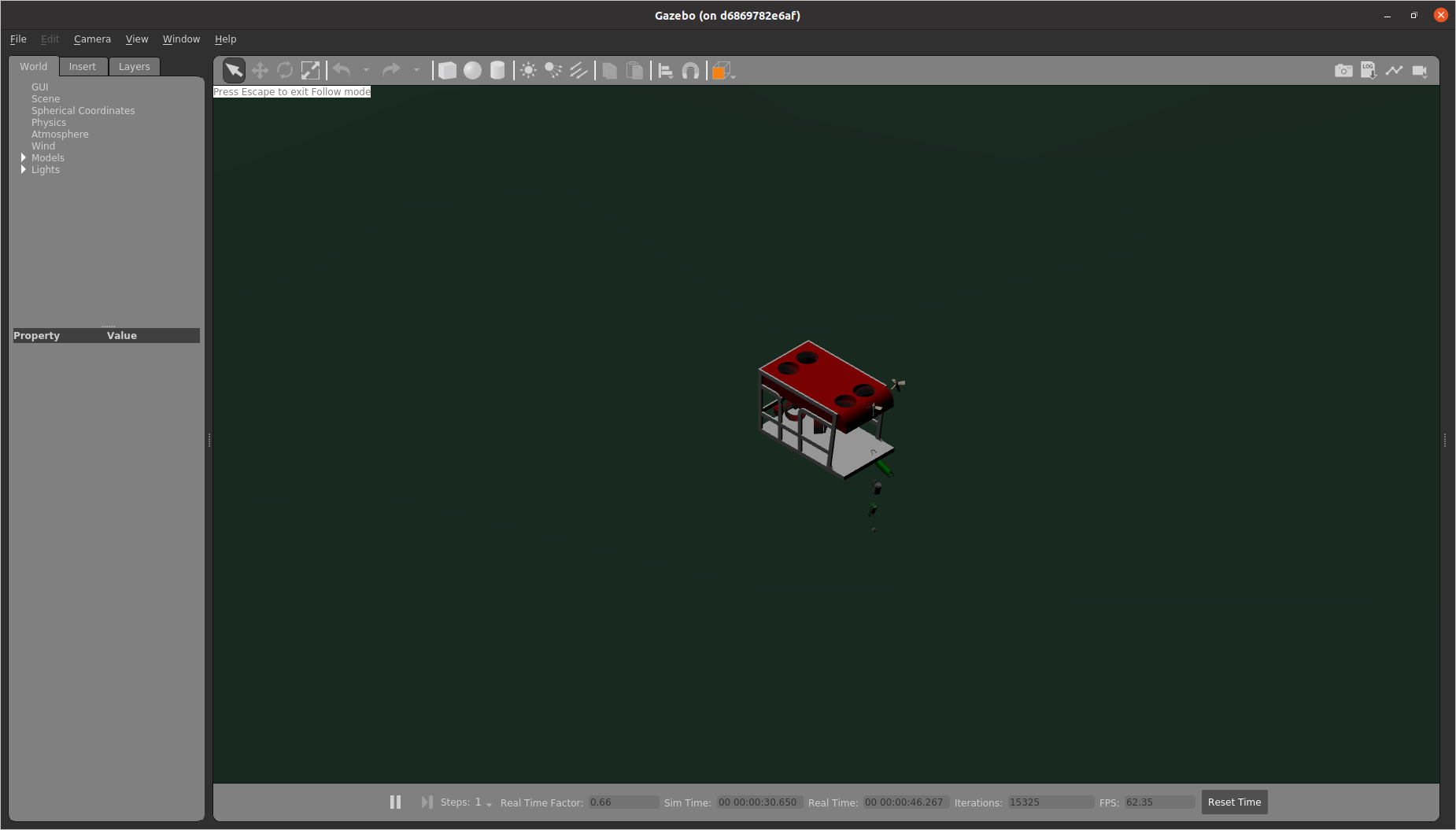
@quarkytale more than thank you for trying it out! hmm.... what a headache. The vehicle teared apart can be ignored (all sensors work as if they are in location). |
|
@quarkytale Thanks for the help! I think this will help me troubleshoot my system. The bathymetry gets loaded for me as well but doesn't display on the screen, so that will narrow down where to look. |
Search everywhere for Ocean current CSV file
|
@j-herman @quarkytale Just popped up in my mind. Maybe you knew it already. |
…e into simple_projection
|
@woensug-choi Yes, I've been working on this in the |
|
Summary of this PR:
|
|
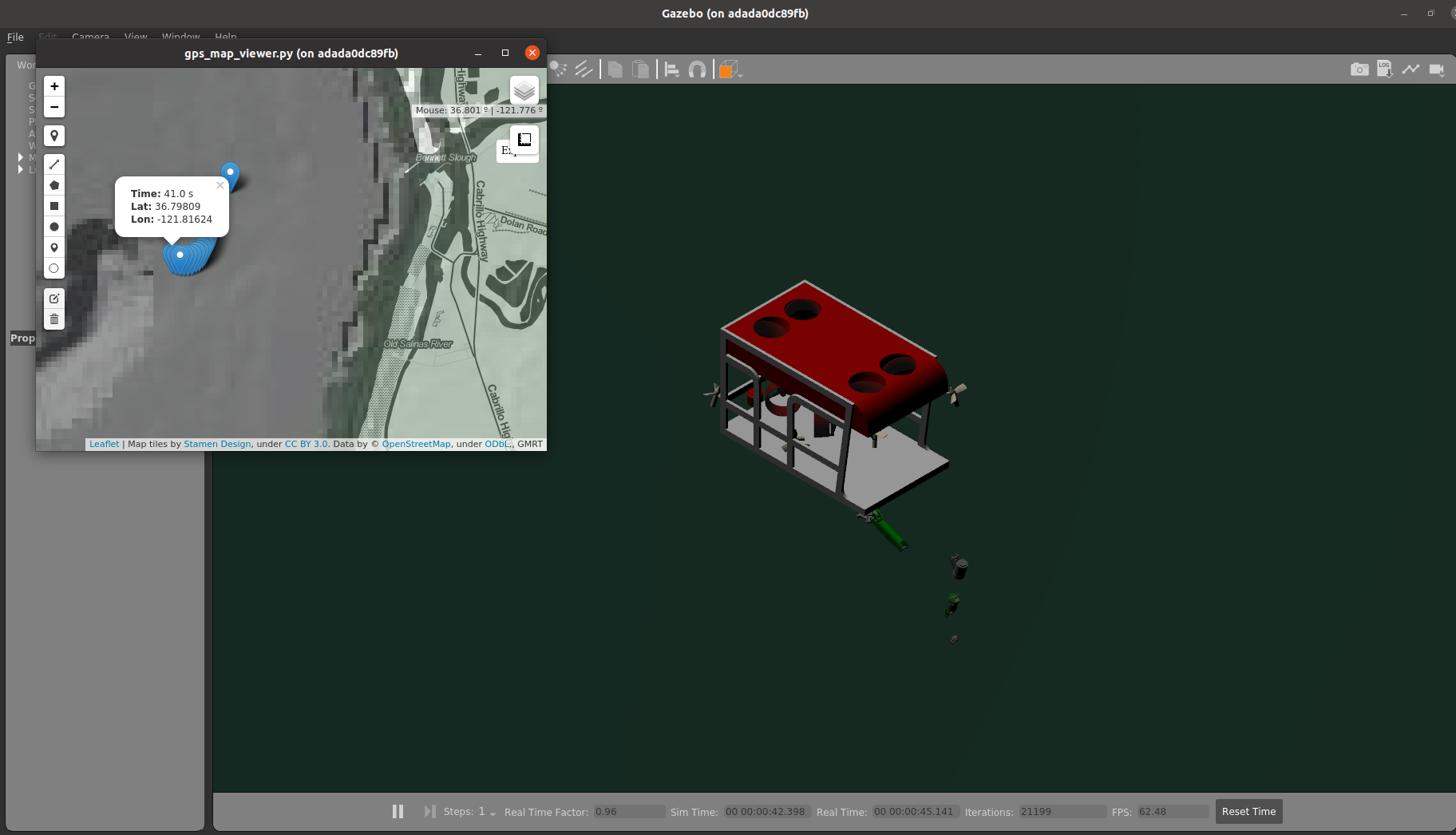
@woensug-choi I am now able to get the bathymetry tiles to show up. At least part of the issue was a mismatch between where python was looking for gdal and where it was installed on my machine. I think that disconnect happened when I went back to the earlier version of gdal. Fixed by reinstalling: The tiles-to-keep option looks like it is working fine. The GPS viewer is still dying without much information, so I'll work on that next. |
|
It's working!
So, this is now working for me, but it seems like a fragile process. Any time I'm combining apt and pip installation steps things seem to go wrong. It might be helpful to try installing everything from one package manager. |
|
@j-herman THANK YOU! FINALLY! I give blame GDAL library version managing. Until new issues on this, we may merge it as it is for now. Could you make changes and additional notes on the wiki page for sudo update/upgrades and sudo apt install python3-pyqt5.qtwebengine? |
|
@woensug-choi I'm sorry for the delayed response, my system had a lot of issues and just finished a new setup. I wasn't in
PS: All this was in dockwater noetic, haven't tried on base system. |
|
@woensug-choi @quarkytale Two options I see for the wiki: either we can specify all of the packages and versions agnostic to package manager (no commands included) with a warning that mixing pip and apt can cause trouble, or we can pick one or the other to give detailed instructions. The steps I ended up following are not good ideas for the wiki, I think, and I do want to clean up my whole installation. |
|
@j-herman Well, I think those version mismatches should not happen. I was thinking of including installation files for specific versions in the demo.tar. What do you think of this option? I've updated to gps_map_viewer.py on google drive! Thank you for noticing git. I agree that we can hold this until after the end of this month's next release. For now, we've confirmed the functionality. I am happy :) |
|
Having the specific versions in the demo.tar would be best for clean installations, but I'm not sure if it would solve the problem for people who already have other versions of some of the tools on their systems or if it might break something. How much work would it be to add that in? If it's hard, probably not worth the risk. If it's easy, after we get through the next release we can give it a try. |
|
Note, for the image built with dockwater (2/23/2022) sudo apt-get update
# For initial lat/lon spawning
sudo apt install python3-gdal=3.0.4+dfsg-1build3
sudo apt install proj-bin=6.3.1-1
# For GPS Viewer
sudo apt-get install libxtst6
# Install required python3 modules
pip3 install folium PyQtWebEngine pyqt5-toolsNote, |
|
@woensug-choi Sounds good! I should have some time this week to try a fresh install on the office computer with the new dockerfile. |
|
@j-herman Maybe I should make a PR at dockwater to include those necessary packages. |
|
@woensug-choi I have this on my list to try Friday when my system is back up. Any updates or recommendations before I give it a fresh look? |
|
@j-herman Thank you for trying it out! An update would be HonuRobotics/dockwater#22 ! |
|
@j-herman Pinging... just a few days left to wrap this up! |
|
@quarkytale Could you give this a spin? Need to test dockwater PR bundling necessary libraries. |
|
Whoops... giving it a shot now! Sorry for the delay. |
 j-herman
left a comment
j-herman
left a comment
There was a problem hiding this comment.
I was able to get this to run locally on my machine by installing gdal, folium, etc. per the tutorial., without any previous installations of gdal or other tools that might interfere. I got the same errors when installing that are noted on the dockwater PR (HonuRobotics/dockwater#22) but it didn't cause any problem with running the demo.
The docker environment is not working, but both the GPS viewer and the tiles-to-keep functionality are looking good here.
|
@j-herman So, the tutorial works! Yay! I shall debug dockwater PR. Thank you for testing! |
New Flag to set how many tiles to keep in the scene
Added a new flag
tiles_to_keepfor the bathymetry plugin defined at a world file.This feature was particularly necessary for
dsros_sensors's DVL sensor. After reviewing the #179 and Field-Robotics-Lab/ds_sim#6 to fix DVL sensor error, following error was caused at the very moment of the replacement of the tiles.There could be sensors susceptible to instantaneous missing bottom. The new flag will allow users to choose how many files to keep to avoid such errors.
GPS Viewer
What was available (but was not suitable for our purpose)
Objective
Requirements
# just in case if not done sudo apt-get install python3-gdal pip3 install folium PyQtWebEngine pyqt5-toolsFeatures