
日本語 | English
キューブを自動で崩したり揃えたりする、LEGOで作れるロボットです。
キューブをランダムに崩します。
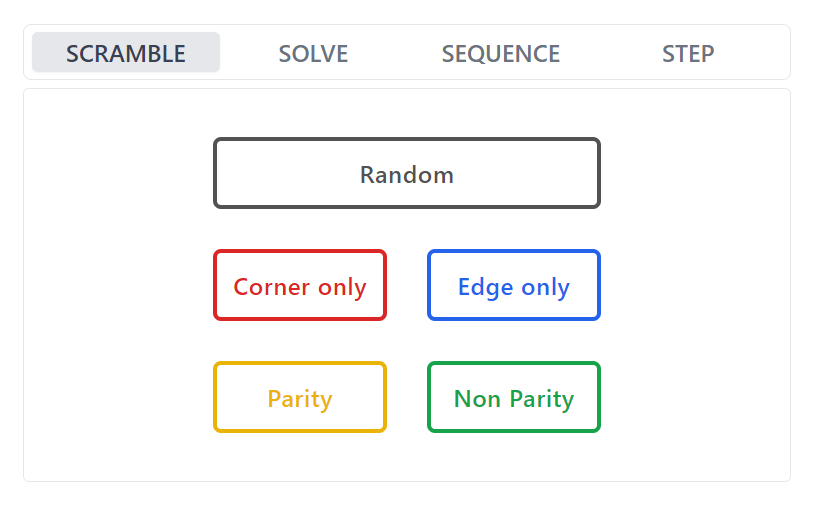
キューブを揃えます。
揃えたいキューブの状態はWeb UIから入力します。
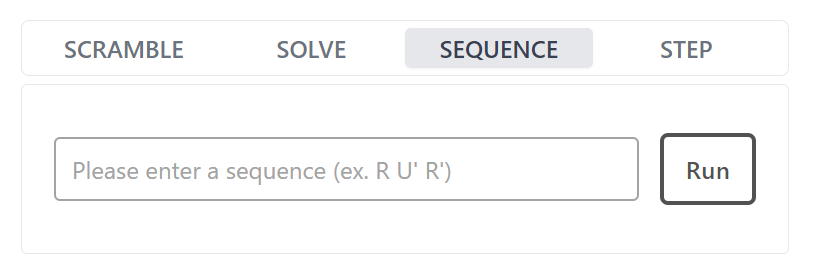
任意のシーケンスを実行します。
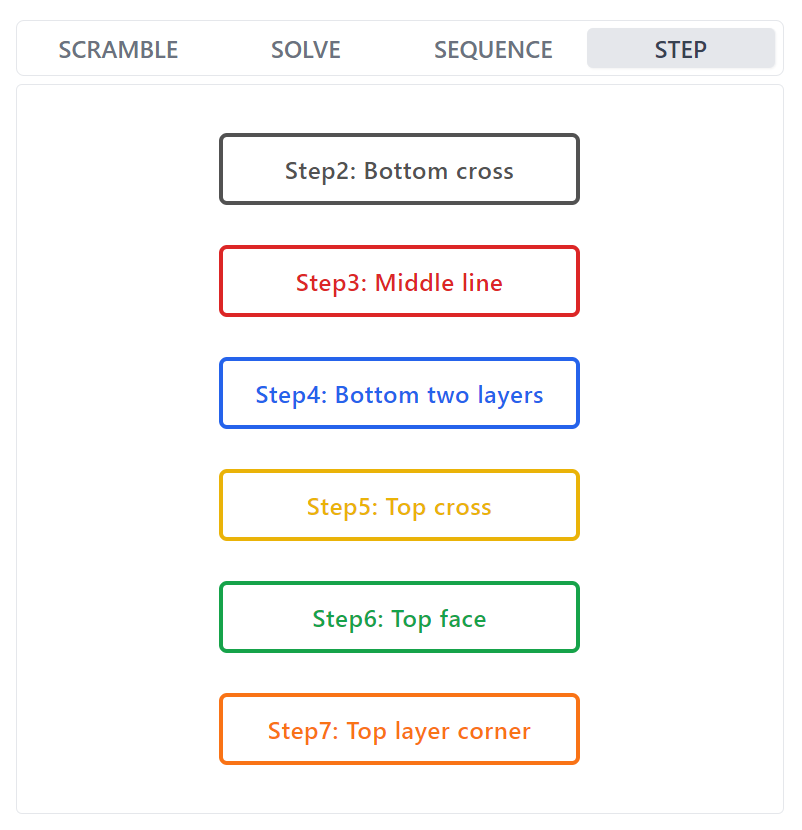
M2Lメソッドの各ステップのランダムな状態に崩します。
練習したいステップを重点的に練習できます。
solve-demo.mp4
Node.jsアプリケーション、LEGOロボットに分けてそれぞれのセットアップ方法を公開しています。
セットアップ方法で分からないことがあったらGitHubのIssueか、私のメールアドレス <miso.develop@gmail.com> までご連絡ください。
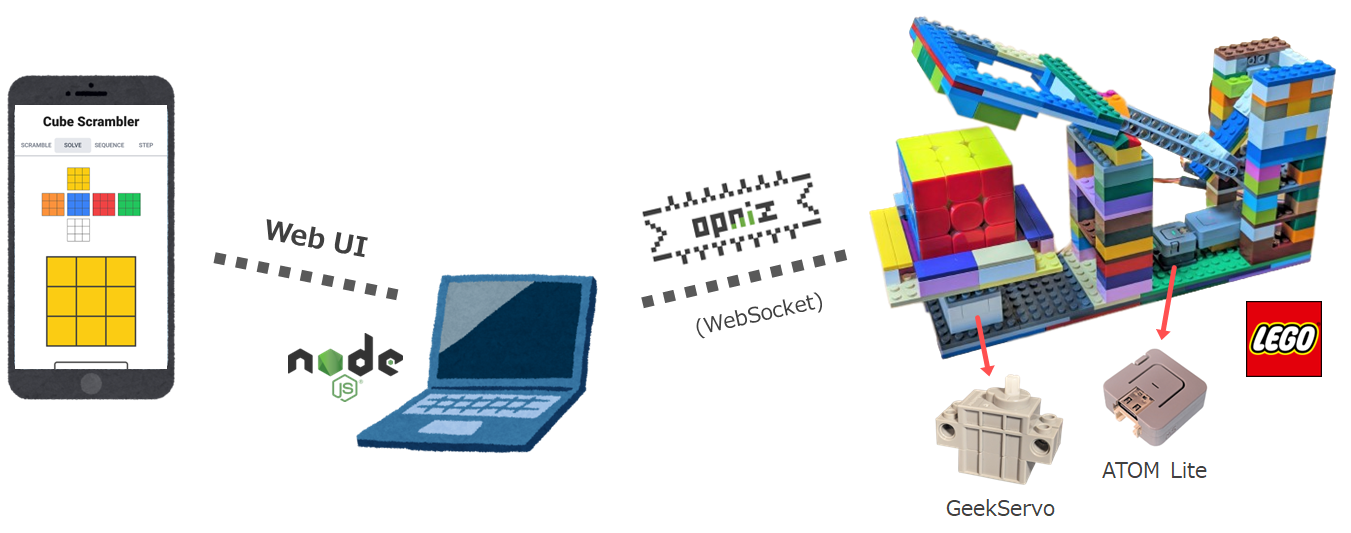
Cube Scramblerの制御にはNode.jsアプリケーションを使用します。
Node.jsアプリケーションでは、Web UIを提供するWebサーバーと、マイコンを制御するWebSocket(opniz)サーバーを実行します。
ロボットの動作にはGeekServoというレゴにくっつけられるモーターを使用します。
モーターはATOM Liteで制御します(他のM5Stackシリーズのデバイスも使えます)。
マイコンはopnizというIoTフレームワークを使用し、WebSocketを介してNode.jsアプリケーションで制御します。
