このパッケージには, 知能ロボットコンテストに向けたシミュレーション環境とロボットの動作プログラムがあります.
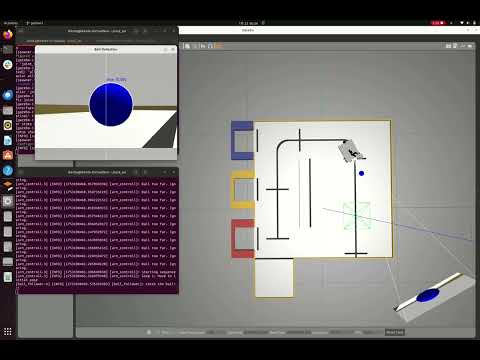
- カメラにボールが映るまでライントレースを行う.
- ボールを検出したらライントレースを終了し目標ボールに接近.
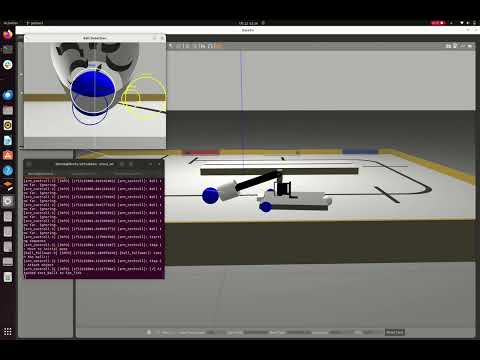
- 目標ボールとの距離が近くなったら, アームを制御してボールを確保.
cd ~/ros2_ws/src
git clone https://github.com/ken222d/arm_detecting_controll- アームの動作
cd ~/ros2_ws
colcon build
source install/setup.bash
#ターミナル1
$ ros2 launch arm_detecting_controll rdc_arm.launch.py #Gazebo起動
#ターミナル2
$ ros2 run arm_detecting_controll linetrace_controll
#ターミナル3
$ ros2 run arm_detecting_controll arm_controll
#ターミナル4
$ ros2 run arm_detecting_controll multi_color_ball_detector #GUI起動
#ターミナル5
$ ros2 run arm_detecting_controll ball_follower- ライントレース及びボール検出、接近
- アーム動作
- arm_controll アームの動作制御ノード
- linetrace_controll付きアーム動作制御ノード
- multi_color_ball_detector カメラノード
- ball_follower 車輪の制御ノード
- ROS 2 Humble
- Gazebo Classic
- Ubuntu22.04
本プロジェクトの開発・検証にあたって, 以下のOSSツールをUbuntu上で使用しました(本リポジトリには含まれていません):
- gazebo_ros2_link_attacher: Gazebo上でリンクを接続するためのROS 2パッケージ
- gazebo_ros_control: GazeboとROS 2のインターフェース
これらのコードは本リポジトリに含まれていませんが, 検証・開発において活用しました.
- このソフトウェアパッケージは, 3条項BSDライセンスの下, 再頒布および使用が許可されます.
- © 2025 Kenta Ishizeki