Home
We're a private rescue robot team, which was founded mid 2017 in Nuremberg, Germany. Our main goal is to develop a robot which takes part in the rescue robot challenge (see RoboCup German Open). Before we founded the team, we were members of the RoboCup Rescue Team AutonOHM of the Nuremberg Institute of Technology. Our long time goal is to establish a non-profit organization in Nuremberg, which can be used as a forum for everyone who is interested in mobile robotics, espacially rescue robotics. We hope to be able to help pushing the development of cheap rescue robots forward. The challenging task of a private team is to develop robots, which are really cheap due to the fact that there is no big fund available.
| Name | Function |
|---|---|
| Christian Merkl | Electronic/PCB Engineering, Software Engineering |
| Martin Fees | Embedded Software Engineering, Mechanical Engineering |
| Michael Schmidpeter | Electronic Engineering, Software Engineering |
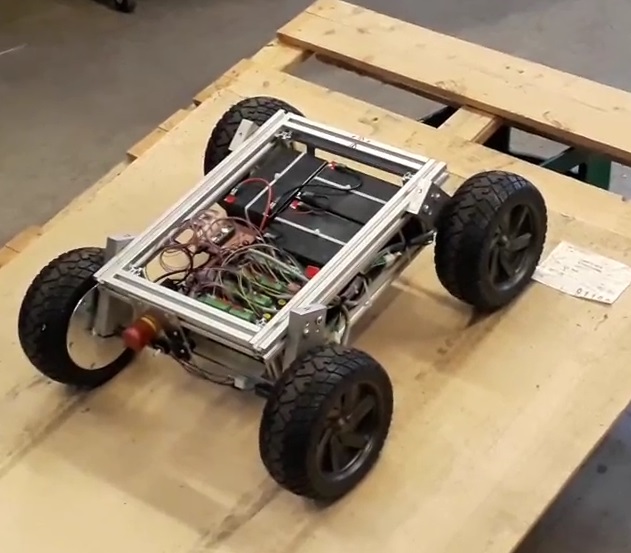
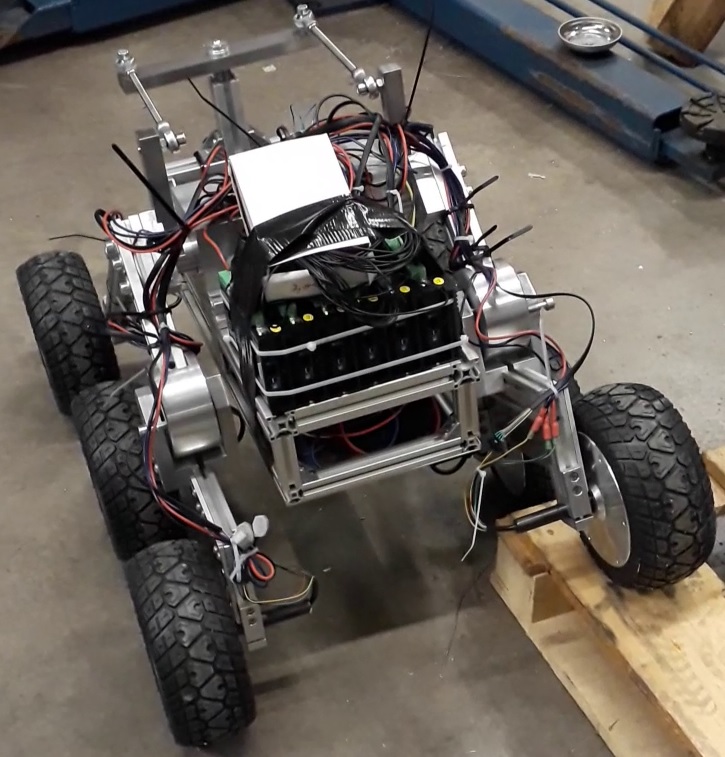
Two robots are currently being developed. The first robot "Morty's Mule" was used only for benchmarking the motor controllers and motors. It is also intended as a test platform, since the mechanics are very simple.
The second robot "Morty" will serve as the main platform for the RoboCup and is based on the rocker-bogie principle of the Mars Rovers Curiosity.
One of the biggest advantages of this concept is its high off-road capability.
To Do: Add description and images
To Do: Add description and images
Contains schematic, pcb layout and software of the francor's universal can board. See universal_can_board.
Computer aided design data of the robots of the rescue robot team FRANC0R. See CAD.
A ROS package that contains models and plugins for Gazbeo to simulate the francor's robots. See francor_simulation.
Please send questions to franc.or@mail.de